یک گروه پژوهشی از MIT و دانشگاه ژجیانگ اومده بودند راهی پیدا کنند تا رباتها بتونن هم سبکتر باشن و هم حرکتهای نرم و طبیعتری داشته باشن. ایدهشون ساده بود: به جای نصب موتورهای سنگین توی هر مفصل، از «کابل» استفاده کنن؛ مثل اینکه با کشیدن یک نخ ربات خم یا پیچ بخوره. مثلا وقتی کابل رو از کف دست تا نوک انگشت ربات میکشیم، انگشت ربات خم میشه و مثل یک دست واقعی حرکت میکنه. اما تا حالا کابلها رو باید بعداً دستی از سوراخها عبور میدادیم که کار وقتگیر و پیچیدهای بود. پژوهشگران برای حل این مشکل روش جدیدی به نام Xstrings ارائه دادند. اونا با یک پرینتر سهبعدی دو-مادهای خاص، تونستند تمام قطعات یک دستگاه کابلی – از جمله کابلها و اتصالات مکانیکی – رو در یک مرحله با هم چاپ کنند. یعنی بعد از چاپ، ربات کاملاً حرکتپذیره و نیازی به مونتاژ دستی کابلها نیست!
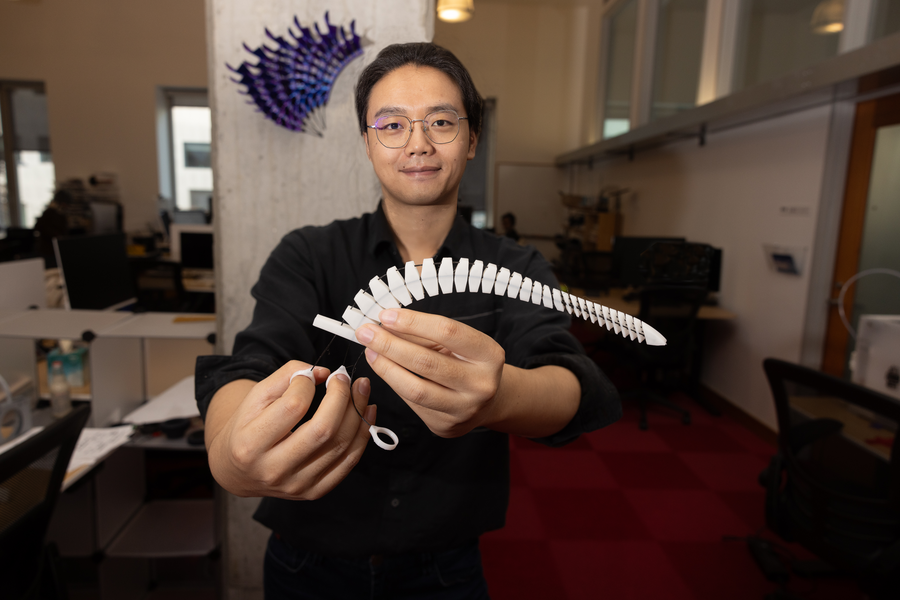
در تصویر بالا، یکی از محققان MIT را میبینید که قطعهای چاپشده بهظاهر ساده را در دست گرفته. این قطعه در نگاه اول شبیه یک تکه سفید خمیده به نظر میآید، اما داخلش «طناب» یا کابلهای کوچکی تعبیه شده که وقتی کشیده میشود، قسمتهای این قطعه خم میشوند. روش Xstrings یعنی چاپ یکتکهی همهکاره: ساختار اصلی با PLA (پلاستیک سخت) و کابل با فیلامنت نایلون، طوری که در طول ساخت، پرینتر بخش کابل را همزمان با بخش بدن چاپ میکند. به این ترتیب، پس از پایان پرینت، دیگر احتیاجی به نخ کردن دستی کابل و بستن پیچومهرههای اضافی نیست. این موضوع باعث میشود هم در وقت ساخت ربات صرفهجویی شود و هم وزن نهایی ربات کمتر شود، چون موتورهای سنگین را میتوان دورتر یا کوچکتر در نظر گرفت. خود Jiaji Li، پژوهشگر MIT و سرپرست این پروژه، میگوید روش جدیدشون میتواند حدود ۴۰٪ زمان کل تولید یک دستگاه کابلی را کاهش بده.
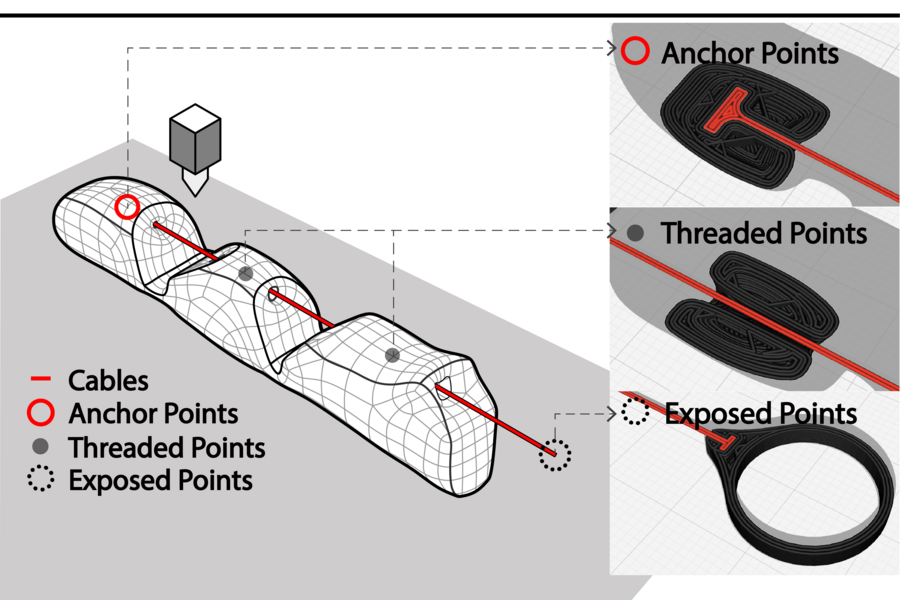
شکل بالا نمایی شماتیک از یک بخش رباتی چاپشده با Xstrings را نشان میدهد. خطوط قرمز «کابل» را نمایش میدهند که از میان جسم چاپ شده عبور کرده است. در یک سمت کابل (دورنگی قرمز) یک نقطه تکیهگاه T شکل («Anchor Point») تعبیه شده که انتهای کابل را محکم در ساختار فیکس میکند. کابل سپس از «کانالهای عبوری» (نقاط خاکستری یا Threaded Points) رد شده که یک لایه نازک فضای آزاد دور تا دور کابل میگذارند تا هنگام کشیدن، کابل بدون گیر کردن حرکت کند. انتهای دیگر کابل (دورنگی قرمز نقطهنقطهای) بیرون آمده و طوری تعبیه شده که کاربر یا یک موتور کوچک میتواند آن را بکشد و حرکت دستگاه را فعال کند. با همین طراحی، وقتی کابلو میکشیم، مفاصل مختلف قطعه شروع به حرکت میکنند – درست مثل ساقه مارمولک که با کشیدن نخ زندگی میکند.
چهار حرکت پایه
نرمافزار طراحی Xstrings چهار نوع حرکت ساده را به عنوان «حرکات اولیه» در نظر گرفته که با کشیدن کابل فعال میشوند. این حرکات پایه در کنار هم، ابزار اصلی ساخت حرکتهای پیچیدهتر هستند. به طور خلاصه این چهار حرکت عبارتند از:
خمش – حرکت منحنی مثل خم شدن یک انگشت. وقتی کابل را میکشیم، قسمتهایی که با مفصل به هم وصل شدند مثل انگشت خم میشوند.
پیچش – حرکت به شکل فنر. هنگام کشیدن کابل، بخشهای متوالی میچرخند و مثل یک مارپیچ فشرده میشوند.
پیچخوردن (فشاری-چرخشی) – مشابه سفت کردن یک پیچی. در این حالت ساختمان یک حالت مارپیچ دارد و کشیدن کابل هم باعث چرخش و هم کمی فشرده شدن طولی میشود.
فشردگی – جمع شدن مستقیم مثل آکاردئون. کشیدن کابل باعث میشود بخشهای قطعه در یک راستا به هم نزدیک و مانند جعبهای تاشو تا شود.
این حرکات را میتوان با هم ترکیب کرد: مثلا چند خمش پشت سر هم سریوار مثل بدن یک مار طولانی عمل میکنند، یا چند خمش موازی کنار هم مثل انگشتان یک پنجه عمل میکنند. همه این ترکیبها به طراحها امکان میدهد اشکال متنوع و پیچیدهای بسازند. از حرکت مارمولک راه رونده تا پنجهی نهنگمانند، هر کدام با انتخاب درست این حرکات تولید میشوند
این حرکات را میتوان با هم ترکیب کرد: مثلا چند خمش پشت سر هم سریوار مثل بدن یک مار طولانی عمل میکنند، یا چند خمش موازی کنار هم مثل انگشتان یک پنجه عمل میکنند. همه این ترکیبها به طراحها امکان میدهد اشکال متنوع و پیچیدهای بسازند. از حرکت مارمولک راه رونده تا پنجهی نهنگمانند، هر کدام با انتخاب درست این حرکات تولید میشوند
این حرکات را میتوان با هم ترکیب کرد: مثلا چند خمش پشت سر هم سریوار مثل بدن یک مار طولانی عمل میکنند، یا چند خمش موازی کنار هم مثل انگشتان یک پنجه عمل میکنند. همه این ترکیبها به طراحها امکان میدهد اشکال متنوع و پیچیدهای بسازند. از حرکت مارمولک راه رونده تا پنجهی نهنگمانند، هر کدام با انتخاب درست این حرکات تولید میشوند.
مزیتها و چالشها
روش Xstrings چندین مزیت مهم دارد. اول اینکه دیگر لازم نیست چند ساعت برای عبور دادن کابل و بستن آن وقت بگذاریم – چون همه چیز در پرینت شکل میگیرد، پژوهشگران اعلام کردند زمان ساخت کلی حدود ۴۰٪ کاهش پیدا میکند. از طرفی استفاده از فیلامنت نایلون برای کابلها باعث میشود کابل حین چاپ به بدنه پلاستیکی نچسبد. نایلون ۶۶ که به عنوان ماده کابل انتخاب شده، نقطه ذوب بالاتری نسبت به PLA دارد؛ همین تفاوت نقطه ذوب باعث میشود کابل در دمای پرینت PLA دچار ذوب یا چسبیدن به بدنه نشود و بعداً آزادانه حرکت کند. تنظیم دقیق دما و سرعت چاپ هم اهمیت دارد: پژوهشها نشان دادهاند دمای حدود ۲۶۰°C و سرعت نسبتاً پایین (۱۰-۱۵ میلیمتر بر ثانیه) برای پرینت کابل بهترین نتیجه را میدهد و امکان ساخت کابلهای مقاوم را فراهم میکند، به طوری که کابلها با ۶۰,۰۰۰ بار کشش پشت سر هم بدون پاره شدن دوام آوردند.
البته این روش چالشهایی هم دارد. برای اینکه کابل در لایهبهلایه چاپ نشود و به بدنه نچسبد، لازم است ضخامت لایه، فضای خالی اطراف کابل و سرعت پرینت تنظیم دقیق شوند. اگر از تنظیمات مناسب استفاده نکنیم، ممکن است کابلها هنگام چاپ به بدنۀ ربات بچسبند یا بخشهای چاپ شده جدا شوند. محققان برای غلبه بر این مشکلات در هر نقطه عبور کابل، کمی فاصله اضافی (مثلاً ۰.۵ میلیمتر) در کانال ایجاد میکنند تا اصطکاک کم شود و کابل راحت حرکت کند.
در مجموع، Xstrings به طراحها این امکان را میدهد که خیلی سریعتر طراحی کنند و ماشینهای پیچیدهتری بسازند. کاهش زمان تولید و حذف مونتاژ دستی، باعث شده بتوان انواع رباتهای با حرکات نرم و چندگانه را در مدت کوتاهتری بسازند. میشود ماشینهای پیچیده و زیباتر ساخت و حتی برای ساخت رباتهای فضانورد در ایستگاههای فضایی یا طرحهای مد متحرک هم ازش استفاده کرد.
ابزار طراحی و آینده
برای سادهتر کردن کار کاربران، محققان یک ابزار نرمافزاری مخصوص طراحی ساختهاند. این ابزار که روی پلتفرمهایی مثل Rhino 8 و Grasshopper توسعه یافته، اجازه میدهد کسی که زیاد مهندس نیست هم مدلی وارد کند، نوع حرکت را انتخاب کند (مثلاً خمش یا پیچش)، زاویه و تعداد بخشهای حرکت را تنظیم کند و مکان اتصال کابل را تعیین کند. حتی میشود حرکت نهایی را شبیهسازی کرد و دید قبل از پرینت چه اتفاقی میافتد. در نهایت ابزار همهی اطلاعات لازم را به پرینتر دوبیرنگ میدهد و فایلهای مجزای بدنه و کابل را با تنظیمات پیشنهادی آماده میکند.
این فناوری و ابزارش یک تحول جدی در دنیای چاپ سهبعدی ایجاد کرده. قبلاً پرینترها فقط اجسام استاتیک میساختند که بعداً باید با موتورها و اتصالات مکانیکی متحرک میشد. حالا Xstrings بخش اصلی نیروی محرکه (یعنی کابلها) را هم در حین چاپ درون جسم قرار میدهد. نتیجه این میشود که خودِ جسم چاپشده پتانسیل حرکت پیچیدهای دارد و با کشیدن کابلها میتوان آن را به حرکت درآورد. به قول یک عضو گروه: «این روش به همه کمک میکند تا با یک پرینتر ساده رومیزی رباتها و اجسام کابلی بسازند». در عمل هم نمونههایی مثل مارمولک رباتی رنگی که با کشیدن کابل راه میرود یا پنجهای که با چند کابل به مشت جمع میشود نشان دادهاند چطور میتوان اشیای پلاستیکی ساکن را تبدیل به موجودات متحرک کرد.
به این ترتیب Xstrings راه را برای ایدههای جدید در طراحی رباتها و اشیای چاپی باز کرده است. حالا دیگر عصر ساخت رباتها با مجموعهای از قطعات جدا نیست؛ این فناوری چاپ را به ساختن حرکت نزدیک کرده و امکان خلق ماشینهای سبک، سریعساخت و باحرکت نرم را برای مهندسان و طراحان فراهم کرده است.
منابع: دادهها و اطلاعات این متن از گزارشهای MIT و مقالات مرتبط با پروژهی Xstrings گردآوری شدهاند.
منبع: کلیک کنید


